William Frederick Koch III
Bio
Wil Koch received his BS in computer engineering from University of Rhode Island where he developed interests in machine learning and cyber security. After graduation he worked as a software engineer for six years on the Sikorsky CH-53K King Stallion helicopter project before returning back to academia to receive his MS in machine learning from Stevens Institute of Technology. To focus on his growing interest in cyber security he came to Boston University for his PhD where he was advised by Azer Bestavros. He has published a number of papers in a wide area of cyber security including static and dynamic malware analysis, vulnerability analysis, cyber defense and attacks, and mobile security.
In 2017, Wil was introduced to first-person-view (FPV) drone racing and was immediately drawn to the sport for his love of flight, racing and engineering. This passion drove a shift in his research. He began working with Renato Mancuso, Richard West, and Azer Bestavros to fuse together machine learning and flight control leading to the development of the world's first neural network supported flight control firmware, Neuroflight. In the summer of 2019, Wil received his PhD from Boston University. His thesis, "Flight Controller Synthesis via Deep Reinforcement Learning" has established a baseline for developing next generation flight control systems, opening up new opportunities for advanced aircraft design.
As a leader and someone who encourages continued learning Wil has co-founded CT Hackerspace, Connecticut's oldest and largest hackerspace and founded Boston Drone Racing, an FPV drone racing and hacking club.
Projects
Neuroflight
Neuroflight is the first open source neuro-flight controller software (firmware) for remotely piloting multi-rotors and fixed wing aircraft. Neuroflight's primary focus is to provide optimal flight performance.
View Project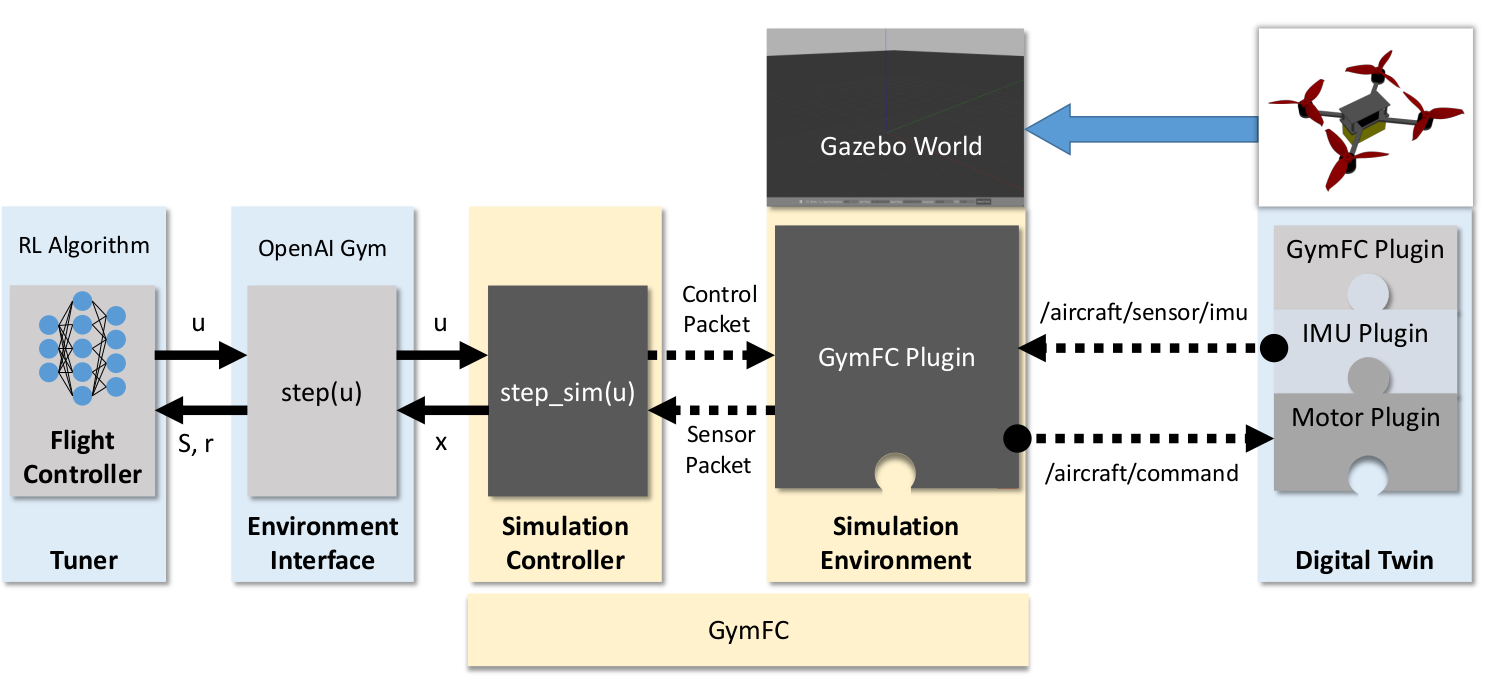
GymFC
GymFC is an OpenAI Gym environment designed for synthesizing intelligent flight control systems using reinforcement learning. This environment is meant to serve as a tool for researchers to benchmark their controllers to progress the state-of-the art of intelligent flight control.
View ProjectSelected Publications
Neuroflight: Next Generation Flight Control Firmware
Pre-print PDF
Reinforcement Learning for UAV Attitude Control
ACM Transactions on Cyber-Physical Systems PDF
Identifier Binding Attacks and Defenses in Software-Defined Networks
USENIX Security Symposium PDF
Semi-Automated Discovery of Server-Based Information Oversharing Vulnerabilities in Android Applications
ACM International Symposium on Software Testing and Analysis (ISSTA) PDF
PayBreak: Defense Against Cryptographic Ransomware
ACM Asia Conference on Computer and Communications Security (ASIACCS) PDF
Markov Modeling of Moving Target Defense Games
ACM Workshop on Moving Target Defense PDF
Experience
Founder/Organizer
Boston Drone Racing (BDR) is a first-person view (FPV) unmanned aerial vehicle (UAV) racing and hacking club. Born from academia, BDR fosters a learning environment and community to teach others how to fly and the knowledge and skills needed to get into the sport. Additionally BDR is actively applying theory and research to push the performance of the technologies used in the sport.
As founder, created website, logo and established communication and organization channels. Secured funding for racing track and supplies. Website
Cyber Security Intern
Developed novel SDN attack called Persona Hijacking that breaks the bindings of all layers of the networking stack and fools the network infrastructure into believing that the attacker is the legitimate owner of the victim’s identifiers, which significantly increases persistence. Results have been published in USENIX Security Symposium.
Software Engineer
Lead software engineer on several software applications for the Sikorsky CH-53K Aircraft's Integrated Support System (ISS). Designed and implemented continuous integration system. Responsible for integration between third-party vendors.
Chairman/Co-founder
CT Hackerspace is Connecticut's oldest and largest hackerspace/makerspace. As a co-founder, established organization through the development of bylaws, identity, physical and web presence. As chairman, ran monthly board meetings to facilitate in the growth and direction of the hackerspace. Republican American Article - Website
Teaching
Teaching Fellow
Teaching fellow for CS-350 Fundamentals of Computing Systems. Designed lesson plans and taught discussion sections. Developed written and programming assignments.
Programming Instructor
Created lesson plans for wide range of skill levels including object oriented fundamentals, polymorphism, exception handling and third-party library integration. Emphasized lessons on coding style and best practices not taught and enforced in academia. Advised students through projects ranging from web crawlers to video games.
Education
Boston University
Thesis title: Flight Controller Synthesis via Deep Reinforcement Learning PDF
GPA: 3.8
Stevens Institute of Technology
Thesis title: A Framework for Assisting Learners by Incorporating Knowledge to Aid in Predicting Nerve Guidance Conduit Performance PDF
GPA: 3.8
University of Rhode Island
GPA: 3.2







