Little innovation has been made to low-level attitude flight control used by unmanned aerial vehicles, which still predominantly uses the classical PID controller. Although PID control has demonstrated exceptional performance, it has its limitations, such as its inability to adapt to change. Our mission is to research, design and develop deep neural network based flight controllers for high-precision applications.

Jan 2019
Published to arXiv
Dec 2018
To appear in ACM Transactions on Cyber-Physical Systems
Nov 2018
View test flight here.
April 2018
Published to arXiv
Neuroflight is the first open source neuro-flight controller software (firmware) for remotely piloting multi-rotors and fixed wing aircraft. Neuroflight's primary focus is to provide optimal flight performance.
View on Github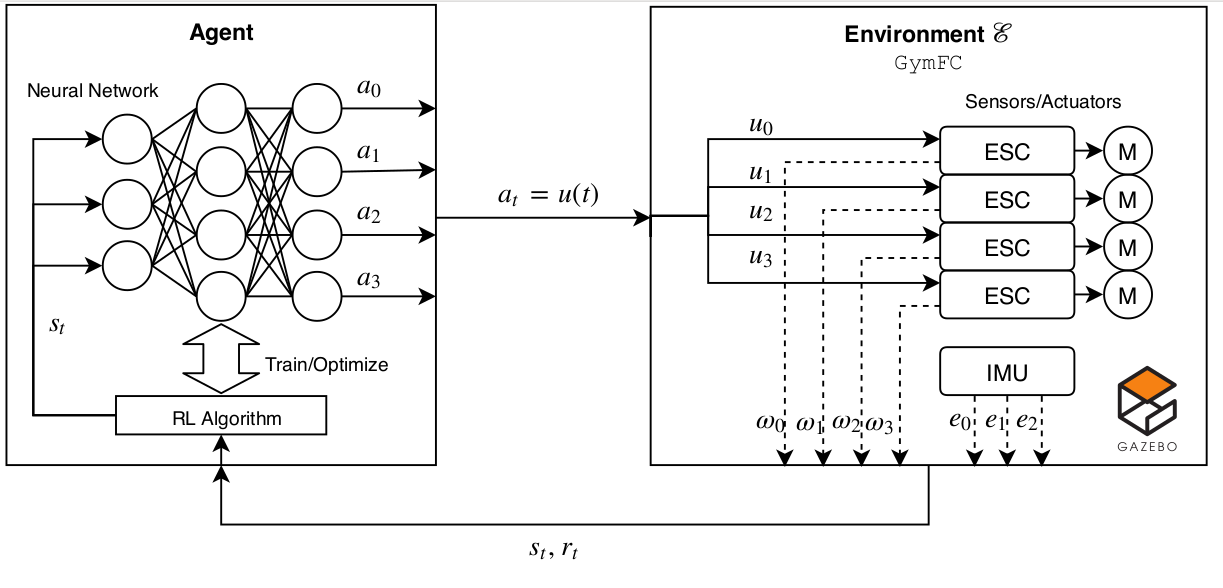
GymFC is an OpenAI Gym environment designed for synthesizing intelligent flight control systems using reinforcement learning. This environment is meant to serve as a tool for researchers to benchmark their controllers to progress the state-of-the art of intelligent flight control.
View on GithubPre-print PDF
ACM Transactions on Cyber-Physical Systems PDF

This research has been partially supported by a grant from the National Science Foundation under awards #1430145, #1414119, and #1718135.




